3.2.1 Напряжения в статически неопределимых конструкциях при сжатии и растяжении


- Информация о материале
- Родительская категория: Раздел 3 ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЕ, ИССЛЕДОВАНИЕ СРЕДСТВ ДЛЯ УГЛУБЛЕННОГО ЭКСПЕРИМЕНТАЛЬНОГО ИЗУЧЕНИЯ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ ТЕНЗОМЕТРИЧЕСКИМ МЕТОДОМ В УЧЕБНОМ ПРОЦЕССЕ В КОНТЕКСТЕКОМПЕТЕНТНОСТНОГО ПОДХОДА В ОБУЧЕНИИ
- Категория: 3.2 Исследование деформаций и напряжений в нагруженных элементах статически неопределимых конструкций
- Опубликовано: 03.11.2016 10:34
- Просмотров: 569
В технике и строительстве часто встречаются конструкции, где число неизвестных усилий в ее элементах больше, чем количество уравнений равновесия, составляемых для данной системы. Такие конструкции принято называть статически неопределимыми.
Примерами статически неопределимых конструкций являются: железобетонная колонна, где внешнее сжимающее усилие воспринимается отдельно стальной арматурой и бетоном, узлы ферм, а также колонна, защемленная с обеих сторон.
Рассмотрим две простые, но наиболее распространенные в практике, статически неопределимые стальные конструкции.
I Конструкция, состоящая из трубы и цилиндрического стержня (рисунок 3.64).
На трубу со стержнем через стальную плиту действует сжимающая сила F. Сначала нужно теоретически определить, какая часть силы F воспринимается трубой и цилиндрическим стержнем отдельно.
Составленное уравнение равновесия имеет вид
RT + RC = F ,
где RT и RC - соответственно усилия, воспринимаемые трубой и стержнем отдельно.
Уравнение совместности деформации получается из условия, что абсолютные укорочения трубы и стержня под действием силы будут равны между собой, т.е.
∆lт =∆lс .
Теоретические значения сил RT и RC определяются из уравнений.
По экспериментально создаваемому усилию F, размерам поперечного сечения и модуля упругости материалов трубы и стержня теоретически определяют силы RT и RС.
Напряжения в поперечных сечениях трубы и стержня соответственно определяются по формулам
Сжимающее усилие F на рассматриваемую конструкцию создается прессом. Схема наклейки рабочих тензометрических датчиков РД1, РД2 на наружных поверхностях трубы и стержня и компенсационного КД тензометрического датчика на недеформируемой стальной пластинке показана на рисунке 3.64. Тензометрические датчики образуют внешний полумост, а их выводы включаются к измерителю деформаций ЦТИ-1. В данном случае прибор имеет два измерительных канала. Рабочий тензометрический датчик РД1 предназначен для измерения относительной деформации трубы, а рабочий тензометрический датчик РД2 - для измерения относительной деформации стального стержня при действии на конструкцию сжимающей силы порядка 20...30 кН
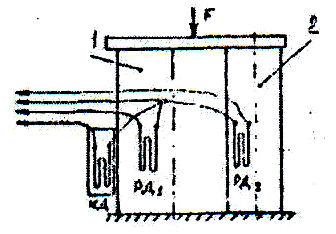
Рисунок 3.64 Электротензометрический метод измерения упругих деформаций в элементах статически неопределимой конструкций:
I - труба, 2 - стержень
По экспериментально определенным значениям относительных деформаций трубы ɛt и стержня ɛс с учетом их модулей продольной упругости ЕT и ЕC согласно закона Гука вычисляются соответствующие этим деформациям напряжения σт и σс в поперечных сечениях элементов статически неопределимой конструкции.
На рисунке 3.64а показана статически неопределимая конструкция,

Рисунок 3.64а Статически неопределимая конструкция при сжатии (труба и стержень)
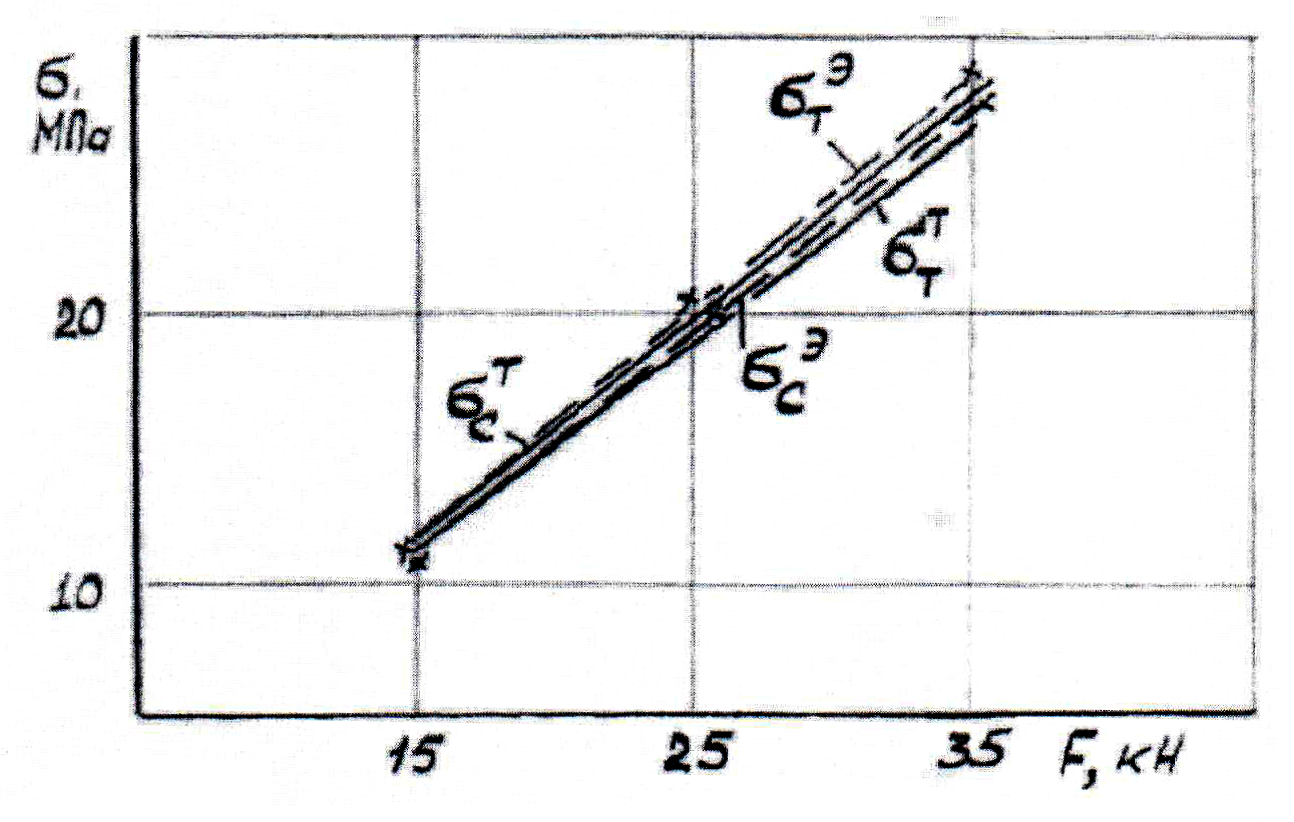
Рисунок 3.65 Напряжения в элементах статически неопределимой конструкции при сжатии в зависимости от действия внешней силы: атс и аэс, атт и аэт - соответственно теоретические и экспериментальные напряжения в стержне и в трубе подготовленная к опытом.
Зная напряжения в поперечных сечениях трубы и стержня, их площади, определяются силы RТ и RС вызывающие эти напряжения:
Rт=σт+Ат и Rс=σс+Ас
Результаты эксперимента и теоретического расчета приведены на рисунке 3.65 (Приложение 3.17).
2 Трёхстержневая статически неопределимая конструкция, нагруженная сжимающей силой (колонна с подпорками).
На два крайние 1, 2 и средний 3 стальные стержни (рисунок 3.66) симметричной статически неопределимой конструкции через плиту 4 действует сжимающая сила F . Необходимо определить, какая часть сжимающей силы F воспринимается каждым стержнем конструкции .
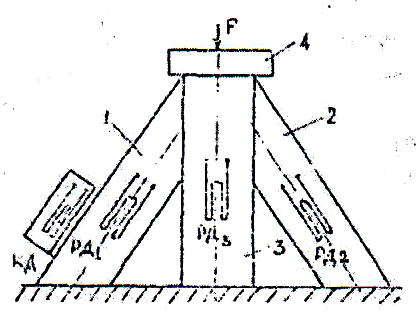
Рисунок 3.66 Схема нагружения узла статически неопределимой фермы
Чтобы составить уравнение равновесия, необходимо силы N1, N2 и N3, возникающие в стержнях под действием силы F , проектировать на ось симметрии конструкции. Уравнение равновесия имеет вид
N1 cosα+N2 cosα+N3-F = 0,
где α - угол, образованный между линией действия внешней силы и осью симметрии стержня.
Исходя из деформируемого состояния конструкции, получено равенство
∆l1=∆l2=∆l3cosα ,
где ∆l1 , ∆l2 и ∆l3 соответственно абсолютные деформации стержней I, 2, 3.
где E1, Е2, Е3, А1, А2, A3, l1, l2, l3 - соответственно модули продольной упругости материала, площади поперечного сечения и длины стержней.

Рисунок 3.67 экспериментальная установка, подготовленная к опытам
Силы N1, N2 и N3 определяются совместным решением уравнений равновесия и деформаций.
Напряжения в поперечных сечениях стержней I, 2 и 3 определяются по формулам:

Сжимающее усилие на статически неопределимую конструкцию создается прессом. Схема наклейки тензометрических датчиков на поверхностях стержней рабочих РД1 , РД2, РД3 и компенсационного КД тензометрического датчика на недеформируемой стальной пластинке показана на рисунке 3.66.
Установка, подготовленная к проведению опытов, показана на рисунке 3.67.
Тензометрические датчики соединены во внешний полумост, а их выводы включаются к измерителю деформаций и образуют три измерительных канала. Рабочие тензометрические датчики измеряют относительные деформации ɛ1 , ɛ2 и ɛ3 отдельных стержней при действии на конструкцию сжимающей силы F порядка 20...30 кН.
Зная экспериментально определенные значения относительных деформаций ɛ1 , ɛ2 и ɛ3 стержней, по закону Гука вычисляются напряжения σ1, σ2 и σ3 в поперечных сечениях отдельных элементов конструкции.
По величине напряжений σ1, σ2 и σ3 легко определяются усилия N1, N2 и N3, действующие в стержнях в результате приложения на конструкцию сжимающей силы F.
Результаты опытов и теоретических расчетов представлены в приложении 3.18.
3 Колонна, защемленная с обеих сторон
В строительстве и в конструкциях машин и сооружений часто встречаются стержни и колонны, защемленные с обеих концов и воспринимающие осевую нагрузку.
При расчете этих элементов на прочность нужно знать величину опорных реакций от действия реальных нагрузок, то есть часть действующей силы, воспринимаемой каждой опорой отдельно.
В качестве примера рассмотрим стержень круглого поперечного сечения (рисунок 3.68), жестко защемленный сверху и снизу [39]. На расстоянии а от нижней опоры на стержень действует центральная сила F, направленная вверх. Площадь поперечного сечения стержня А, модуль продольной упругости материала - Е.
Нужно определить напряжения и внутренние усилия на нижнем и верхнем участках стержня.
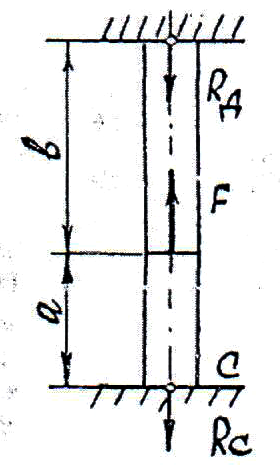
Рисунок 3.68. Расчетная схема колонны, защемленной с обеих сторон
Теоретическое решение рассмотрено в учебной литературе.
Величина нормальных напряжений, возникающих на нижнем и верхнем участках, соответственно равна:
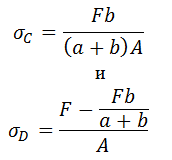
На нижнем участке возникает напряжение растяжения, а на верхнем - сжатия.
Для проведения опытов изготовлена установка (рисунок 3.69), состоящая из основания I, жестко закрепленной к нему стойки 2 с нижней 8 и верхней 3 опорами, испытуемого стального стержня 7, защемленного снизу и сверху.
Осевое усилие на стержень создается при помощи силы F, передающейся на рассматриваемый стержень стальным канатом 6, перекинутым через систему шарнирно вращающихся на кронштейне 5 блоков 4.
Один конец каната закреплен на стержень на расстоянии а от нижней и на расстоянии b от верхней его опор. При этом канат параллелен оси стержня.
В опытах из-за незначительности плеча действия силы F её изгибающим моментом пренебрегаем.
Для экспериментального определения относительных деформаций, возникающих в рассматриваемой точке стержня от внешней нагрузки F, на нижнем и верхнем его участках параллельно оси наклеены рабочие тензометрические датчики РД1 и РД2. Компенсационный датчик КД наклеен на недеформируемой части установки. Тензометрические датчики соединены по полумостовой схеме. Во время эксперимента по сигналам тензометрического датчика РД1 определяется относительная деформация в точке ɛ1 на нижнем участке от силы РД , а по сигналам тензометрического датчика РД2 - относительная деформация ɛ2 на верхнем участке от силы Rc .
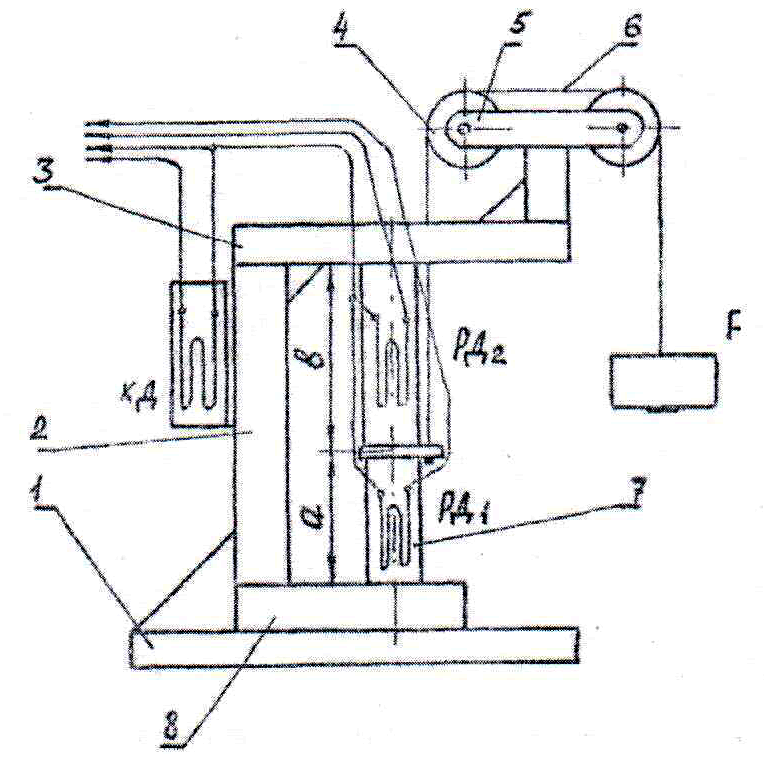
Рисунок 3.69. Экспериментальное определение деформаций и напряжений в точках нагруженной колонны
Соответствующие этим деформациям напряжения вычисляются по закону Гука (Приложение 3.19).
Результаты опыта и теоретического расчета представлен на рисунке 3.70.